 ENG
ENG機器人
注意
❯
- 領域專長課程可能有先修科目或開放對象之限制,選課前請先到臺大課程網確認。
- 領域專長的施行學期若晚於畢業當學期,學生即使修習專長課程且成績及格,仍無法取得認證。
施行學期:110-1 主責單位:機械工程學系
基本資訊
主責教師
姓名
林沛群
email
peichunlin@ntu.edu.tw
聯絡窗口
姓名
歐秋屏
email
cpou@ntu.edu.tw
學習目標
1. 學生能掌握自動控制的概念,分析並設計確保機器人動作精準與穩定的控制系統。<br>2. 學生能結合機械、電子與控制技術,透過實驗解決機器人相關工程挑戰。<br>3. 學生能分析機器人的運動學、動力學、運動規劃與操作原理,設計並評估機器人在各種任務中的效率。<br>4. 學生能運用機器視覺技術使機器人具備環境感知、分析與互動的功能。
課程架構
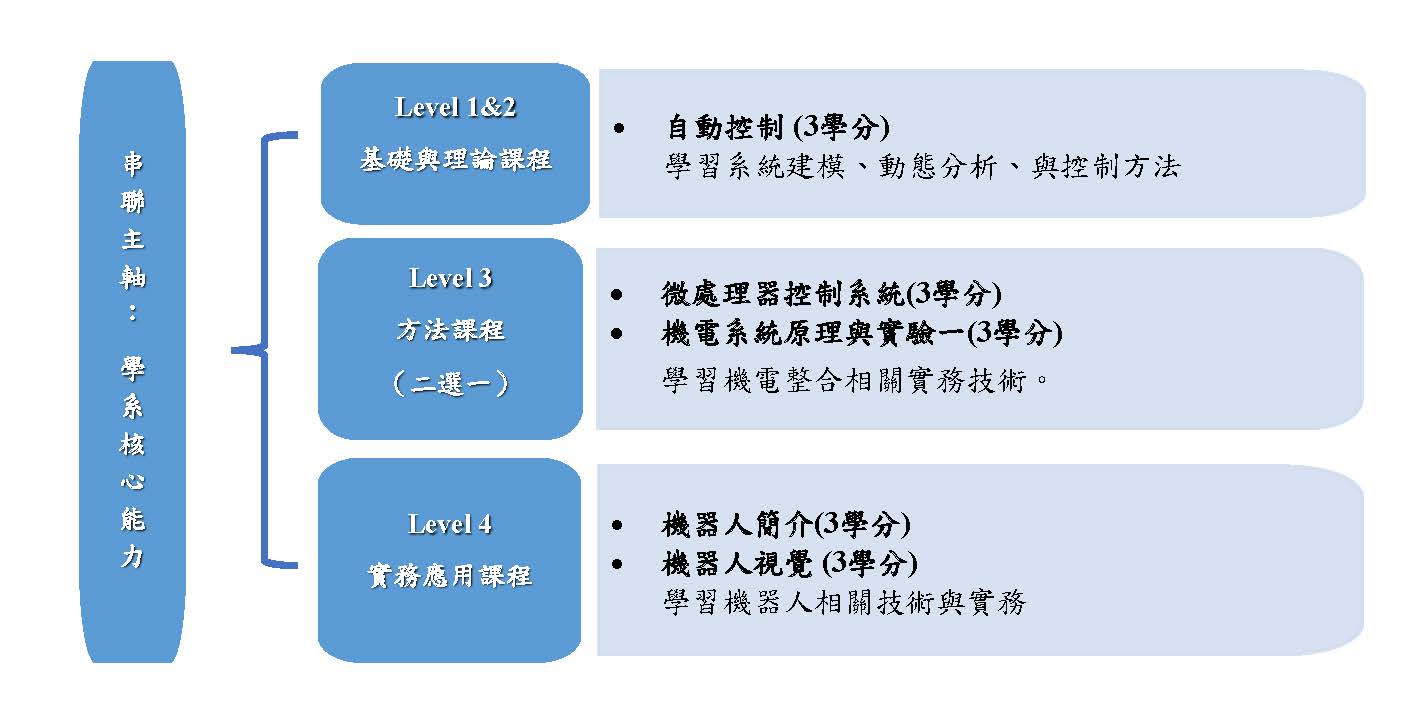
修課指引
本領域專長共需修習4門課12學分。基礎與理論課程需要修習「自動控制」,方法課程需要修習欲修習「微處理器控制系統」或「機電系統原理與實驗一」,應用課程需要修習「機器人簡介」以及「機器人視覺」。這些課程在校內不同系所或有開授同等課程,機械系學生以修習本系開授課程為主,它系學生可修習各自系所開授同等課程,並經過領域專長主責教師簽准同意後經機械系課程委員會審查通過後進行學分認抵。
課程資訊  修習課程說明
修習課程說明
修習課程說明編號
課程識別碼
課程名稱
學分數
備註
【落日條款】
- 適用對象: 112-1 入學之學生。
- 適用範圍: 112-1 (含) 以前終止之領域專長,詳見首頁最新消息。
【修習課程說明】
- 取得本領域專長認證須修習英語授課之班次
- 英語授課之課程識別碼第 4 碼為 E